论文阅读_生成模型_VAE
英文名称: Auto-Encoding Variational Bayes
中文名称: 自编码变分贝叶斯
论文地址: http://arxiv.org/abs/1312.6114
时间: 2013
作者: Diederik P. Kingma, 阿姆斯特丹大学
引用量: 24840
1 读后感
VAE 变分自编码(Variational Autoencoder)是一种生成模型,它结合了自编码器和概率图模型的思想。它的目标是:解决对复杂性高,且量大的数据难以拟合的问题。具体方法是:使用基于变分推理的原理,以变分下界作为目标函数,用梯度方法求取模型参数。
2 通俗理解
听起来非常抽象,简单地说:变分自编码器是自编码器的改进版。
2.1 自编码器
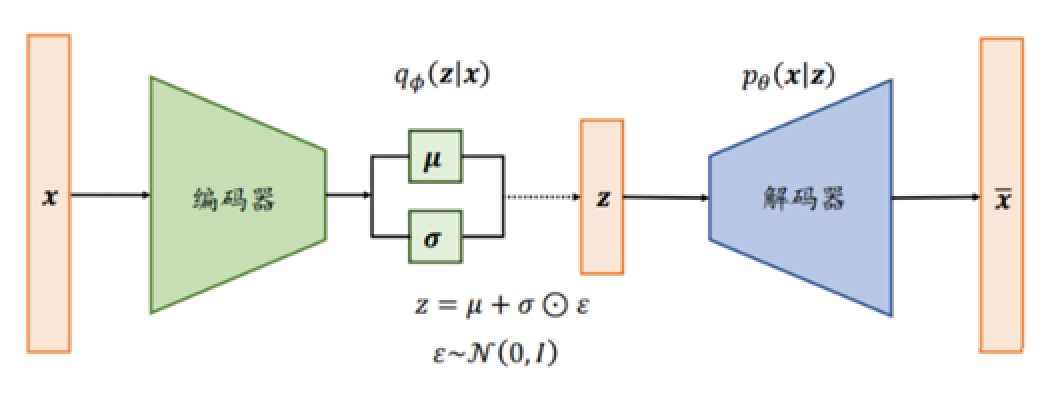
自编码器通常由编码器和解码器两部分组成,其中编码器将原始数据映射到低维表示,解码器则将低维表示映射回原始数据空间。即:原始数据为 x,将其输入编码器降维后,变成数据 z,再经过编码器还原成数据 x'。它常用于高维数据的低维表示和从低维表示中生成高维数据。比如:图像去噪,修复图片,生成高分辨率图片等。
2.2 变分自编码器
变分自编码器在中间加了一层逻辑,它假设中间过程的数据 z 每个维度都是正态分布的,可以使用:均值 μ 和 方差 σ 表示。由此,就变成了变分自编码器:训练编码器和解码器网络,可将图片 x 分布压缩后再拆分成多个高斯分布的叠加,如上图所示。
3 相关概念
3.1 为什么用高斯分布
使用高斯分布的原因是:每张训练图片的内容都不一样,训练过程中产生的潜空间 z 也是离散的,不能确定它的分布。比如数据有满月和半月,但无法产生 2/3 月亮。而高斯分布是连续的,如果能把中间的表征 z 用正态分布描述,它就是平滑的,理论上就可以产生介于两图之间的内容图片,它具有一定的潜在空间的连续性和插值性质。
3.2 高斯混合模型 GMM
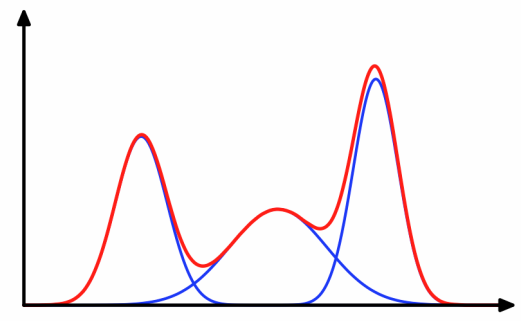
可以想见,z 的分布相当复杂,不是一个简单的高斯分布可以描述的。图中红色为分布曲线。它可分解为一系列不同频率、不同振幅、不同相位的正弦波。也就是说可以用多个正态分布(高斯分布)的叠加去逼近任意一个分布。可以说 VAE 是对 GMM 方法的改进版。
3.3 KL 散度
用于衡量两个分布之间的距离。
3.4 最大似然估计
似然与概率类似,但有如下区别:给定一个函数 P(x|θ),x 是样本点,θ 是参数。
(1)当 θ 为常量,x 为变量时,称 P 为关于 x 的概率函数;
(2)当 x 为常量,θ 为变量时,称 P 为关于 θ 的似然函数;
求解最大似然是指:求使得样本点 x 能够以最大概率发生的 θ 的取值。
3.5 变分推断
变分 Variational 是通过引入一个简化的参数化分布来近似复杂的后验分布。这个参数化分布被称为变分分布,它属于一种可计算的分布族。通过调整变分分布的参数,使其尽可能接近真实的后验分布,从而实现近似推断。
3.6 变分下界
变分下界(variational lower bound)通常用于衡量变分分布与真实后验分布之间的差异。
\[ ELBO = E[log\ p(x, z) - log\ q(z)] \]
其中,ELBO 代表变分下界(Evidence Lower BOund),x 代表观测数据,z 代表未知变量,p(x, z) 表示真实的联合分布,q(z) 表示变分分布。
3.7 代入本文中场景
有一张图 x(后验分布),想把它映射成 z,假设 z 是混合高斯分布 (先验分布),各维可能描述颜色,材质……,用函数函数 g() 把 x 分解成高斯分布,它的逆过程是用 f() 根据高斯分布还原原始图 x‘,最终恢复的图片 x'=f(g(x)),目标是想让 x'-x 值尽量小,就是说:图 x 转成潜空间 z 再转回原始图 x',图像最好没变化。
综上所述,无论 x 是什么,通过变换,产生的 x' 都与 x 很像,中间过程的 z 还能用高斯参数表示,求这样的函数 f 和 g 的神经网络。
3.8 蒙特卡洛估计
蒙特卡洛估计(Monte Carlo estimation)是一种基于随机抽样的统计估计方法,用于计算复杂问题的数值近似解。其基本思想是通过生成大量的随机样本,利用这些样本的统计特性来估计问题的解。
4 方法
(以下图和公式中的变量含义重新开始定义,不要与上面混淆)
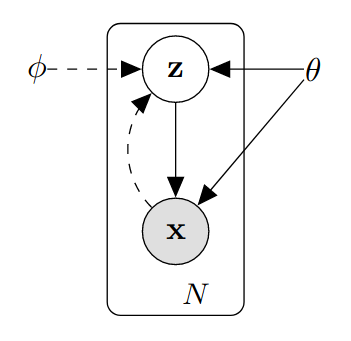
先看一下论文主图,N 是数据集,x 是真实空间(可观察),z 是潜空间(不可观察的连续空间);实线表示生成模型 pθ(z)pθ(x|z),虚线表示 p 的变分近似 qφ(z|x)(也称识别模型),文中使用的方法是用 qφ(z|x) 模拟难以计算的 pθ(z|x),变分参数 φ 与生成模型参数 θ 一起学习。这里的 q 可视为编码器,而 p 视为解码器。
4.1 变分边界
边界似然(Marginal Likelihood)是各观测数据点(每张图片)在给定模型下的概率之和(原图的概率),值越大模型越好,它描述的是图像重建的好不好(重建损失)。
\[ log\ p_θ(x^{(1)}, · · · , x^{(N)}) = \sum^N_{i=1} log\ p_θ(x^{(i)}) \]
各数据点的概率:
\[ log\ p_θ(x(i)) = D_{KL}(q_φ(z|x^{(i)})||p_θ(z|x^{(i))}) + L(θ, φ; x^{(i)}) \]
前半部分 DKL 是 z 的模拟值和真实后验的 KL 散度,KL 散度一定大于 0,后半部分 L 是变分下界(建模的目标):
\[ \log p_{\boldsymbol{\theta}}\left(\mathbf{x}^{(i)}\right) \geq \mathcal{L}\left(\boldsymbol{\theta}, \boldsymbol{\phi} ; \mathbf{x}^{(i)}\right)=\mathbb{E}_{q_{\boldsymbol{\phi}}(\mathbf{z} \mid \mathbf{x})}\left[-\log q_{\boldsymbol{\phi}}(\mathbf{z} \mid \mathbf{x})+\log p_{\boldsymbol{\theta}}(\mathbf{x}, \mathbf{z})\right] \]
这里的 E 是期望,右测是变分下界 ELBO 的公式。
通过移项得到了变分下界的目标函数,公式如下:
\[ \mathcal{L}\left(\boldsymbol{\theta}, \boldsymbol{\phi} ; \mathbf{x}^{(i)}\right)=-D_{K L}\left(q_{\boldsymbol{\phi}}\left(\mathbf{z} \mid \mathbf{x}^{(i)}\right) \| p_{\boldsymbol{\theta}}(\mathbf{z})\right)+\mathbb{E}_{q_{\boldsymbol{\phi}}\left(\mathbf{z} \mid \mathbf{x}^{(i)}\right)}\left[\log p_{\boldsymbol{\theta}}\left(\mathbf{x}^{(i)} \mid \mathbf{z}\right)\right] \]
目标函数是最大化变分下界(Variational Lower Bound):第一项 KL 散度(Kullback-Leibler Divergence)衡量了潜在变量的分布与先验分布之间的差异(z 的差异:越小越好),第二项 重建损失(Reconstruction Loss)衡量了重建样本与原始样本之间相似度(x 为原图的概率:越大越好),所以整体 L 越大越好。
z 对应的多个高斯分布的均值和方差都不是固定的值,它们通过神经网络计算得来,神经网络的参数通过训练得到。
4.2 具体实现
这里引入了噪声变量 e 作为辅助变量,来实现 q 的功能。
\[ \widetilde{z}=g_\phi(\epsilon,x) \]
对某个函数 f(z) 的期望进行蒙特卡洛估计,具体通过采样实现,其 minibatch 是从有 N 个数据点的数据集中,随机抽取 M 个点:
\[ \mathcal{L}(\boldsymbol{\theta}, \boldsymbol{\phi} ; \mathbf{X}) \simeq \widetilde{\mathcal{L}}^{M}\left(\boldsymbol{\theta}, \boldsymbol{\phi} ; \mathbf{X}^{M}\right)=\frac{N}{M} \sum_{i=1}^{M} \widetilde{\mathcal{L}}\left(\boldsymbol{\theta}, \boldsymbol{\phi} ; \mathbf{x}^{(i)}\right) \]
可以将 KL 散度看成限制参数φ的正则化项。而重建误差部分:先用函数 gφ(.) 将数据点 x 和随机噪声向量映射到该数据点的近似后验样本 z,然后计算 log pθ(x(i)|z(i,l)),等于生成模型下数据点 x(i) 的概率密度,从而计算重建误差。
4.3 变分自编码器
在变分自编码器的场景中,先验是中心各向同性的多元高斯分布:
\[ \log q_{\boldsymbol{\phi}}\left(\mathbf{z} \mid \mathbf{x}^{(i)}\right)=\log \mathcal{N}\left(\mathbf{z} ; \boldsymbol{\mu}^{(i)}, \boldsymbol{\sigma}^{2(i)} \mathbf{I}\right) \]
其中均值和标准差是编码 MLP 的输出。由于是高斯分布:
\[ z^{(i,l)} = g_\phi(x^{(i)}, \epsilon^{(l)}) = μ^{(i)} + σ^{(i)} \odot \epsilon^{(l)} \]
引入高斯分布的 KL 散度,最终目标函数是:
